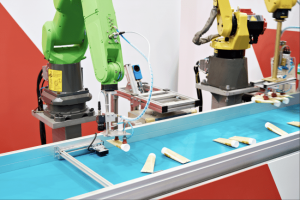
東京大学の学生らにより設立されたAIベンチャー「TRUST SMITH 株式会社(代表取締役社長:渡辺琢磨)」は、同大学の研究開発チームと共に、人工知能を使った障害物回避型アームのアルゴリズム開発に成功した。この技術をロボットに実装することで、これまで手作業で行っていたとされる工場などでのピックアップ作業を自動で行えるようになり、製造業全体での大幅な省力化とコストカットが期待できる。
障害物回避型アームのアルゴリズムについて
この度、同社が開発に成功したのは、「リーマン計量」と呼ばれる微分幾何学の理論に基づくもので、空間内に存在する障害物を回避し、目的物へアプローチすることができるアルゴリズムだ。アームから見た空間内の物体との距離、相対速度または相対加速度に応じて適切に場を計量することができるため、障害物が動いていても安全に回避しながら、目的物へ到達することが可能となるとのこと。
障害物回避型アームに期待される作業の事例
障害物回避型アームの活躍の範囲は多岐にわたり、従来人々が手作業で行ってきたあらゆる作業をサポートすることが期待されている。具体的には、以下のような業界・業種において障害物回避型アームが作業を自動で担うことが可能となるだろう。
- 製造業(金属製品/電子部品など):部品の分別、部品の溶接などの作業
- 製造業(食品):食品の調理工程における作業全般
- 農業:野菜や果物の最適な収穫時期の判定と収穫作業
- インフラ(原油):原油配管の超音波非破壊検査作業
- サービス業(卸・小売):食品スーパーにおける商品陳列作業
- サービス業(空港):空港内手荷物のバックヤードにおける搭載・取降工程における作業

障害物回避型アームのアルゴリズムのドローン航行の自動運転への応用
同社は、障害物回避型アーム以外にも様々なAIソフトウェアの開発に取り組んでおり、その一つとして、ドローン航行の自動運転により、発電施設の故障検知などを無人で行う技術を開発・展開していると発表している。今回開発に成功した障害物回避型アームのアルゴリズムを拡張することで、ドローンの自動運転技術にも適用出来るとのこと。